Columbia – Fall 2008 :
www.ncertainties2.wordpress.com
Die Angewandte (Vienna) - Cross over studio 2008 :

Columbia – Fall 2008 :
www.ncertainties2.wordpress.com
Die Angewandte (Vienna) - Cross over studio 2008 :
→ Leave a CommentCategories: 1
→ Leave a CommentCategories: kyuseon hong
jrt2105@columbia.edu
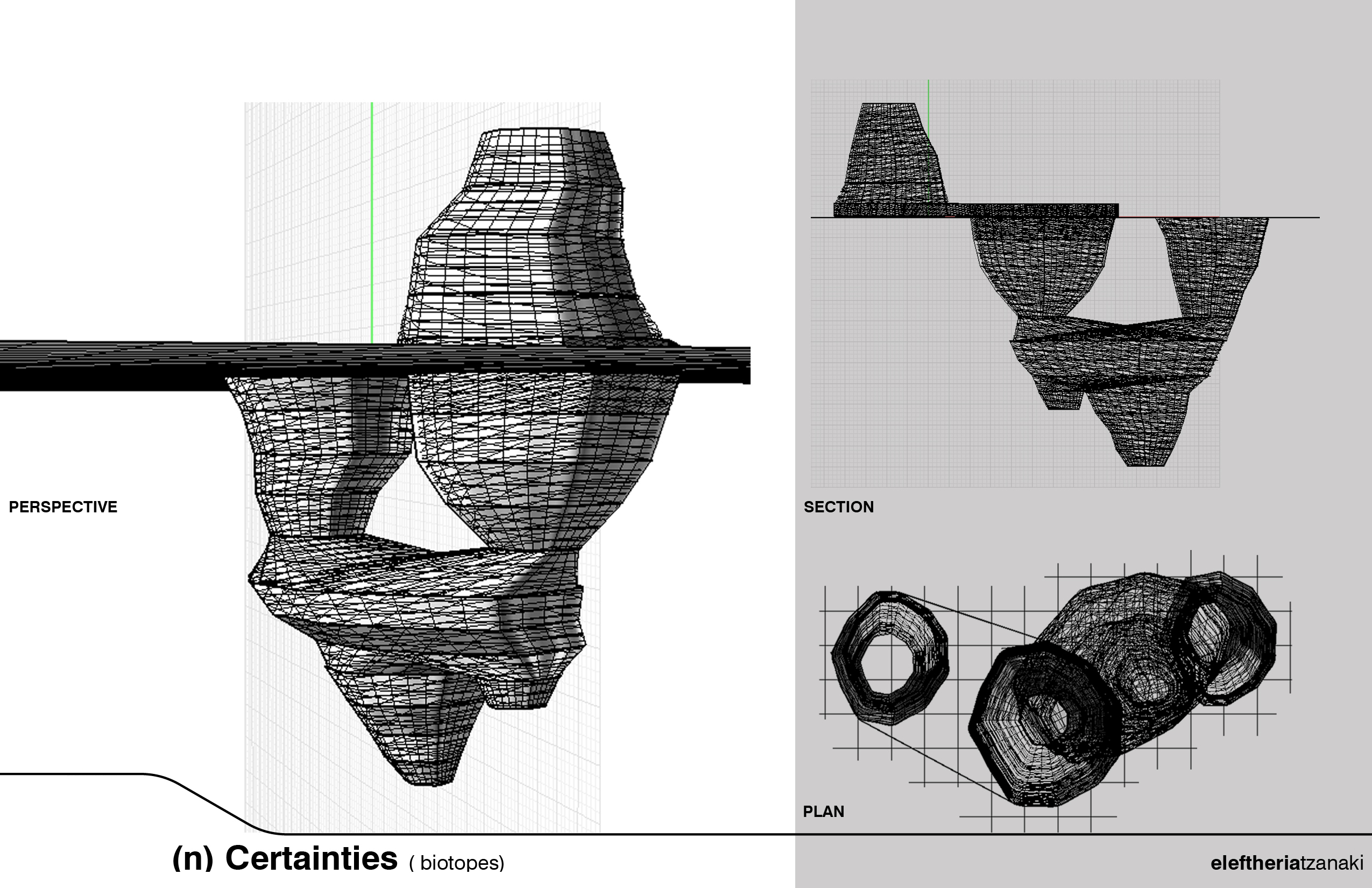
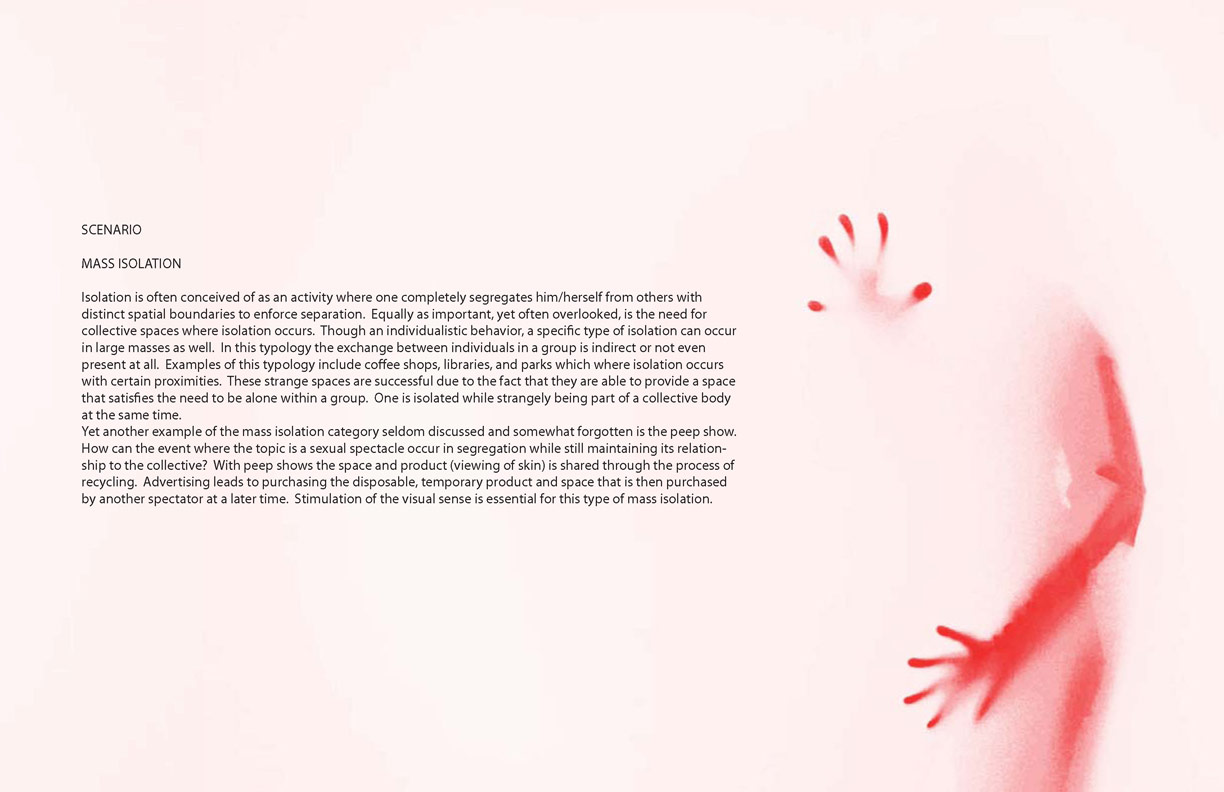
Situations of Materialization
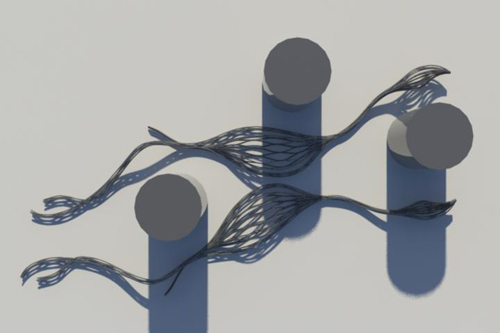
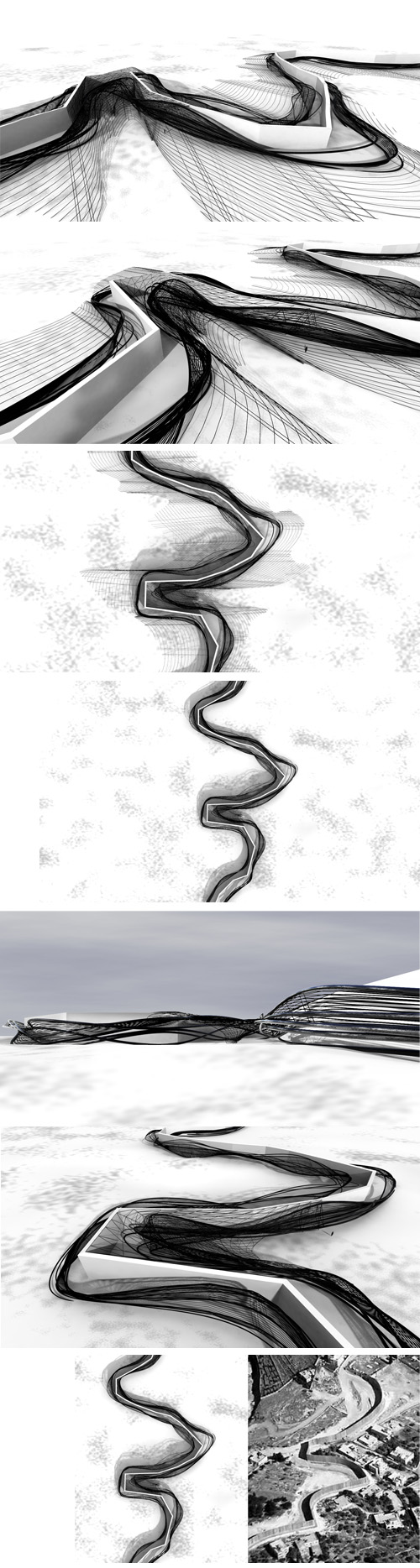
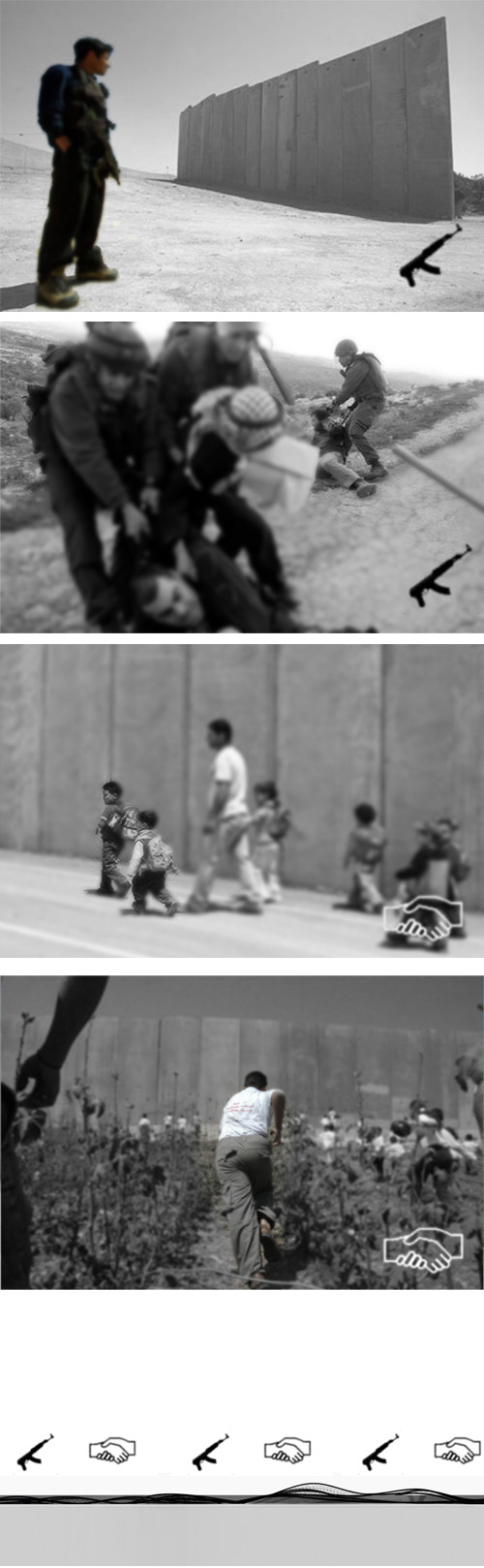
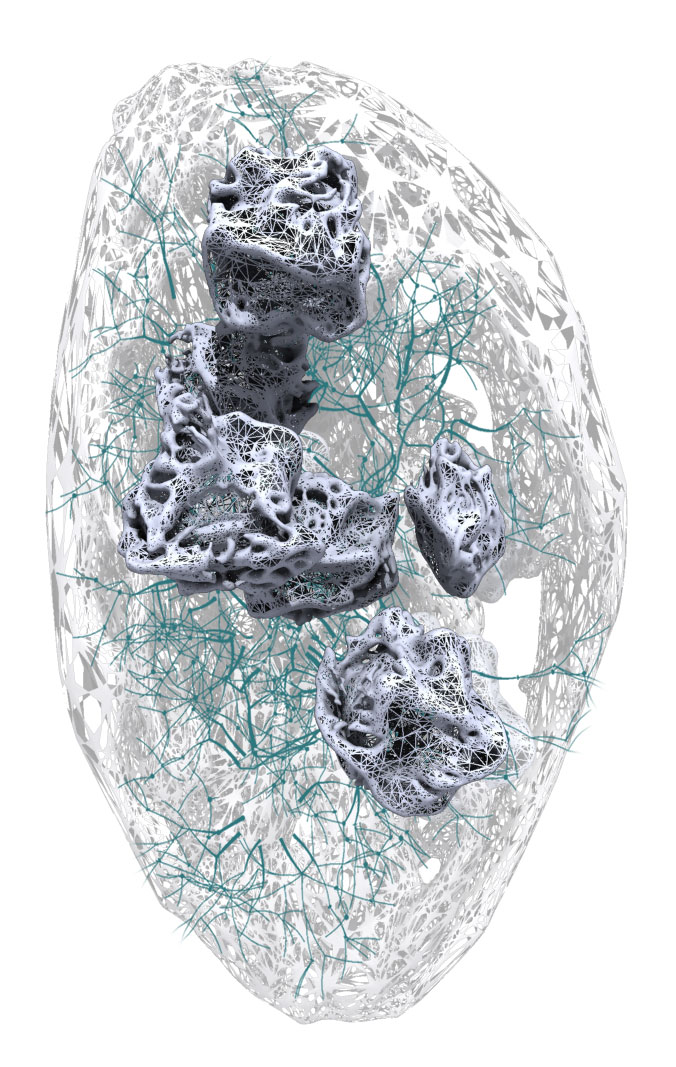
After generations of conflict the Israeli wall has/is being built to minimize friction between Israelis and Palestinians. A total of 436 miles of wall is to be built dividing the peoples.
The wall became a representation of the constant conflict of generations between the Israelis and Palestinians. This large monotonous system has become a generalization of violence. But, along the wall there are extremes of situations, from hostile/violent to normal/peaceful. I am interested in an extraction of these conditions, a materialization of these situations.
The Wall is a network, a connection rather then a division. Is has the potential to connect communities hundreds of miles away. With lack of water the wall can become an aqueduct, adding new infrastructure and establishing new potentials for communities to exist/thrive.
This system is consistent and flexible. Ephemeral and permanent. It has deformations that represent past conditions, current conditions and conditions yet to come. 

As the wall dissolves over time the infrastructure acts as a suture, that leaves behind a new bind through infrastructure and remembrance of the situations before.
→ Leave a CommentCategories: jordan trachtenberg

Click on the above image to view slides from final presentation…
Click here for the ‘final’ script which generated it…
→ Leave a CommentCategories: matthew pauly

→ Leave a CommentCategories: jordan trachtenberg

![]()




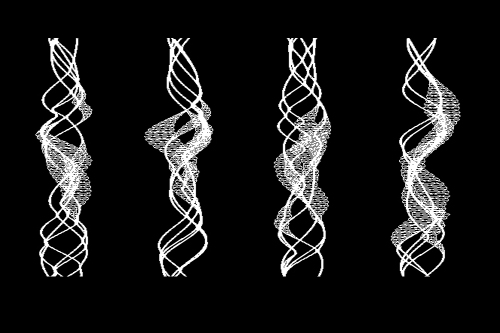
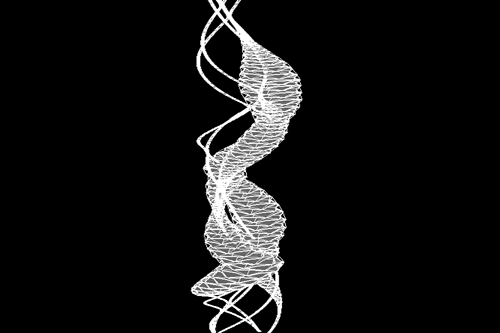
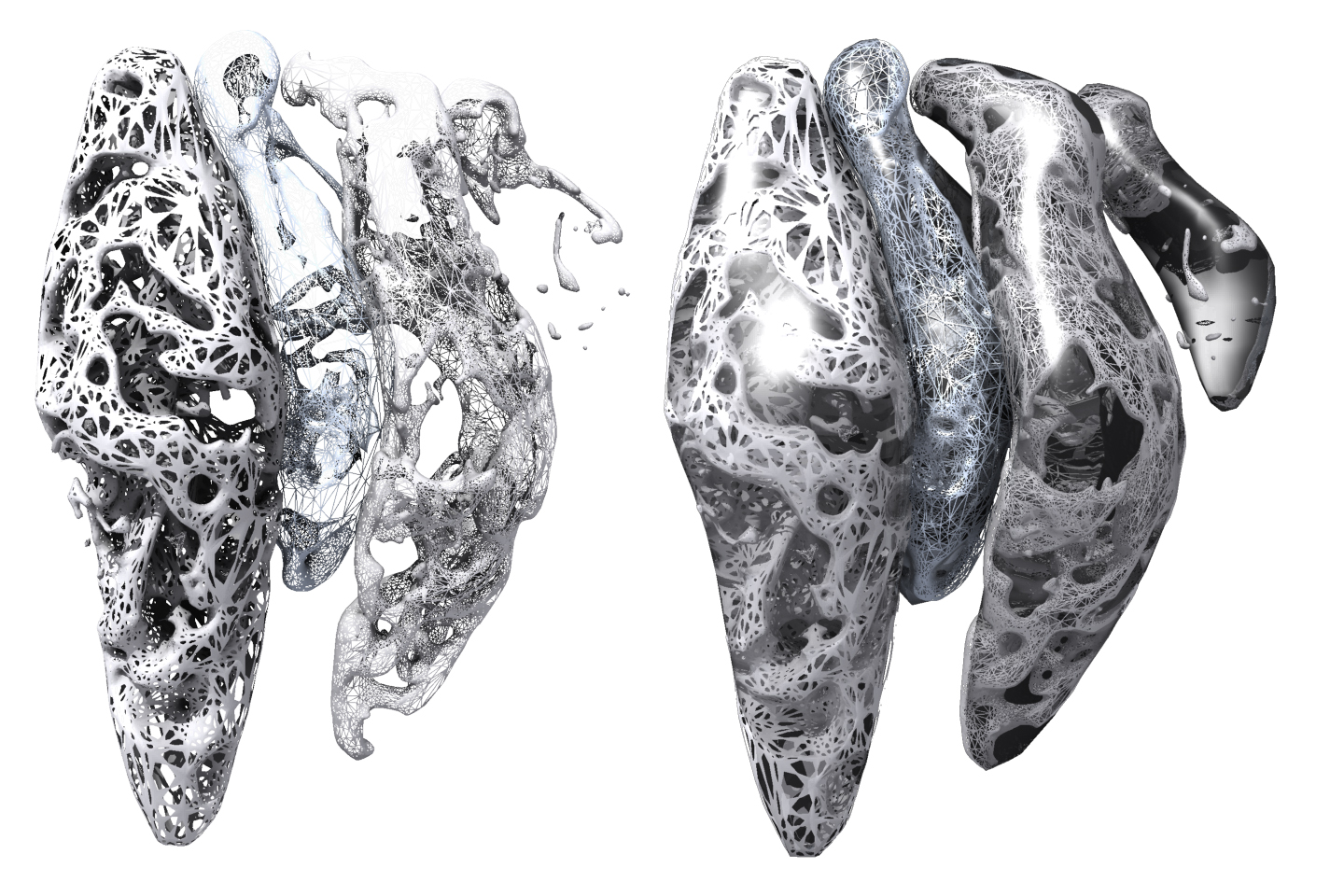
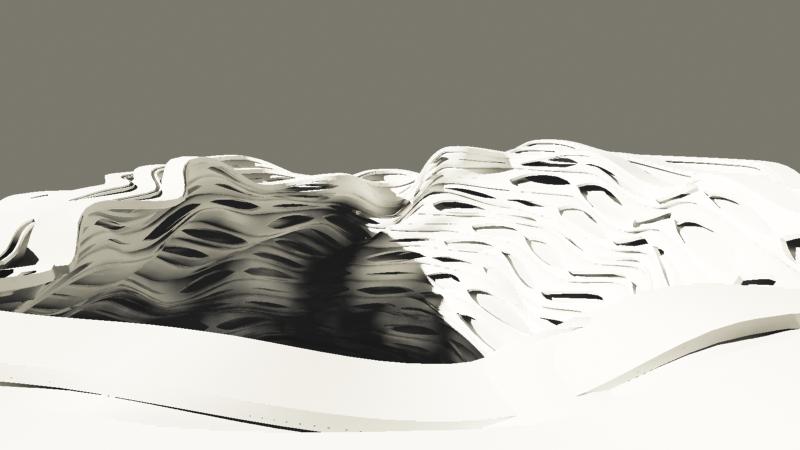
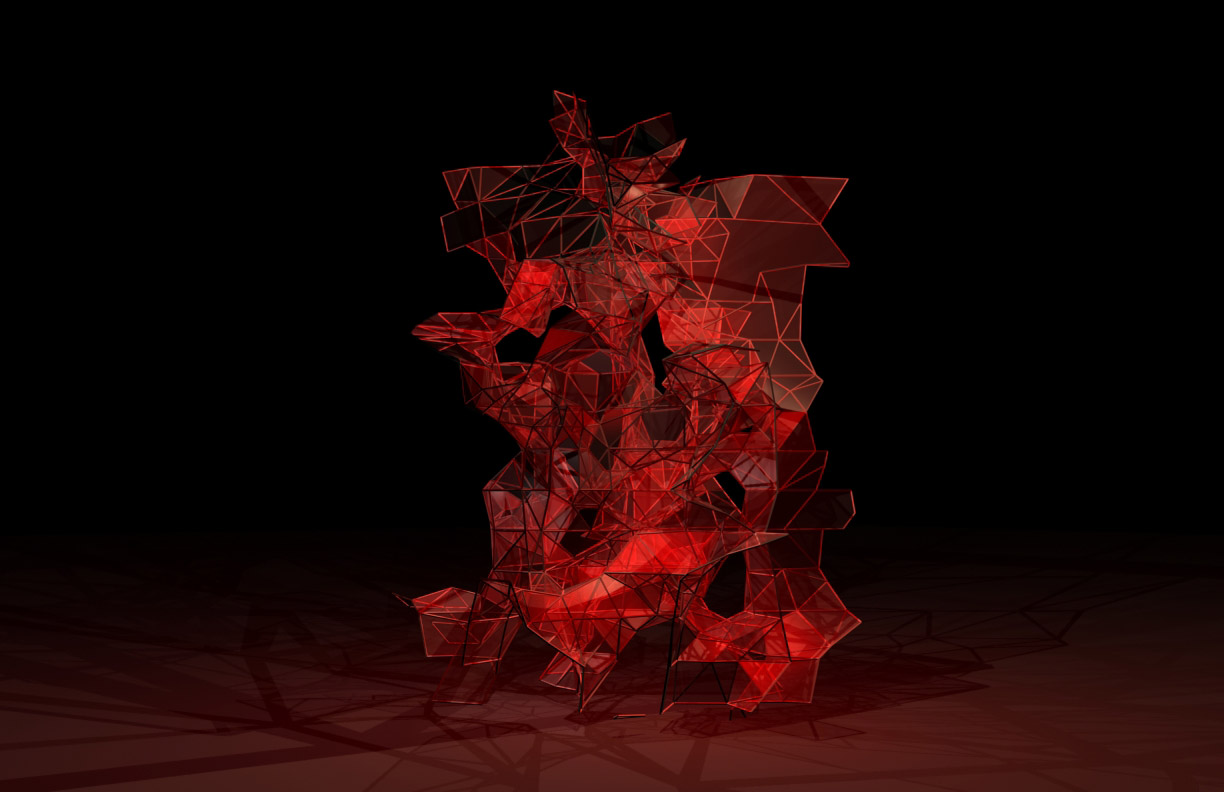
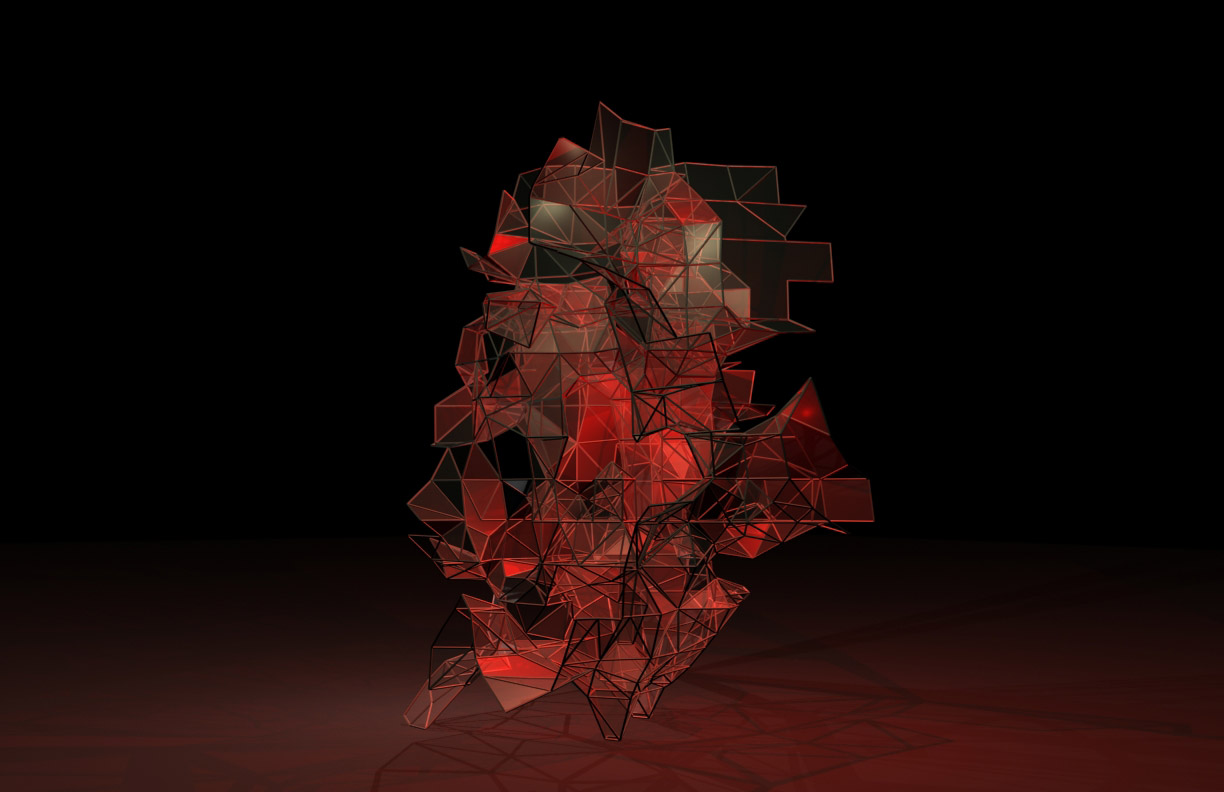
The alternatives…. The two versions are the same system, with the same parameters using a different lofting cross section. The one on the left was from the most recent presentation. The one on the right is updated, attempting to reveal the slabbed nature of the project. Both have good qualities… thoughts?
→ Leave a CommentCategories: matthew pauly
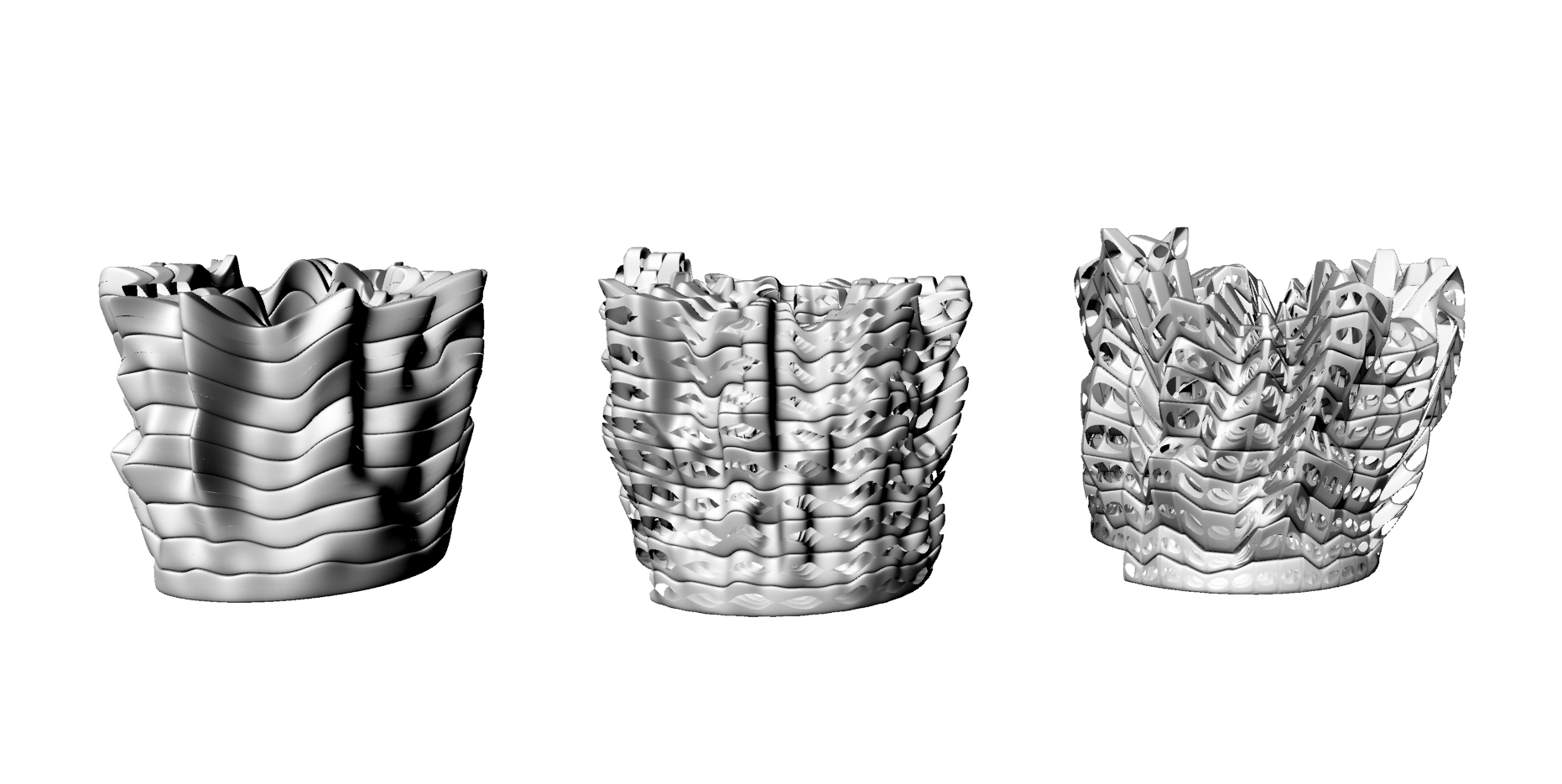
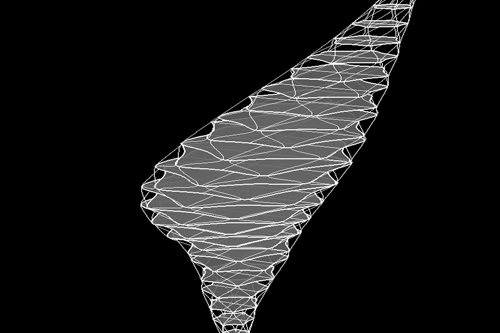
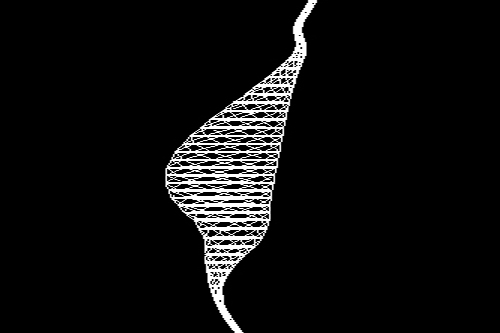
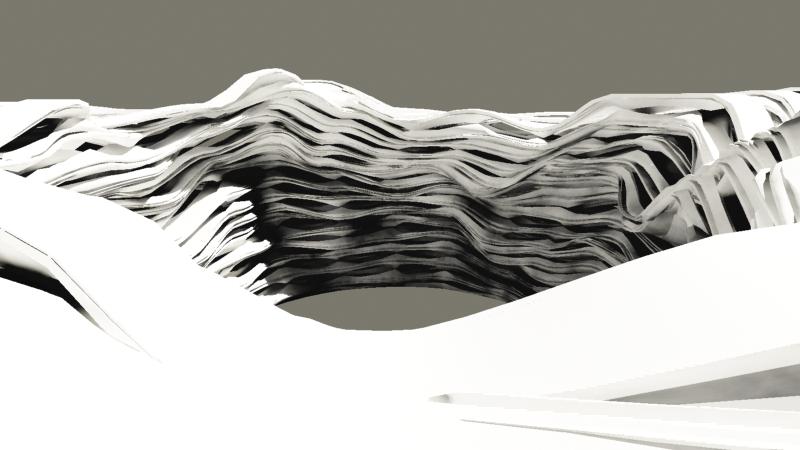
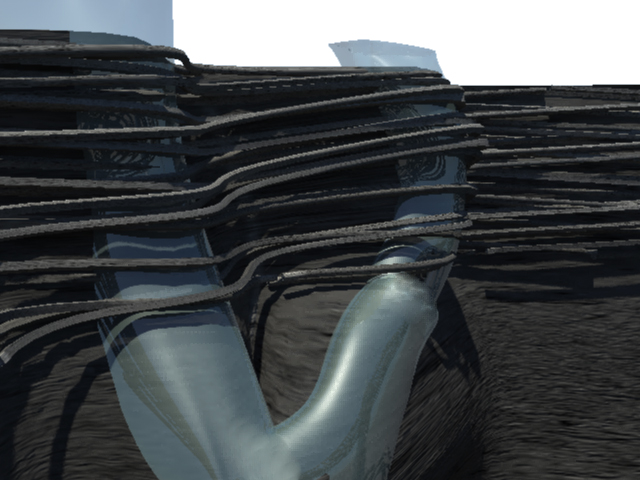
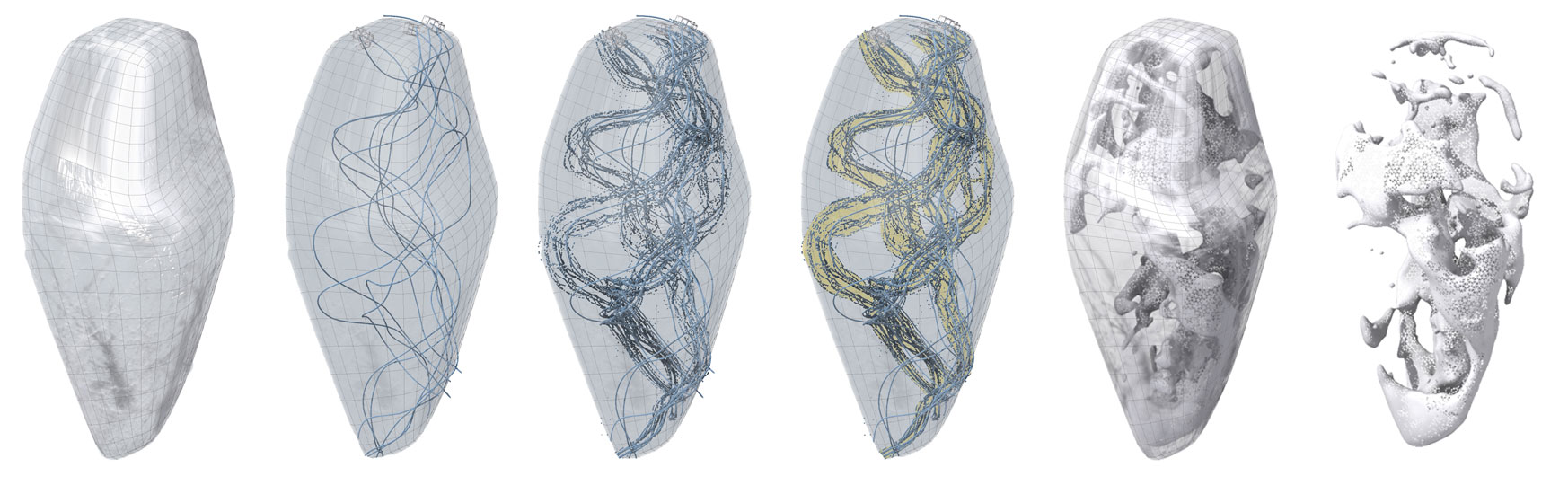
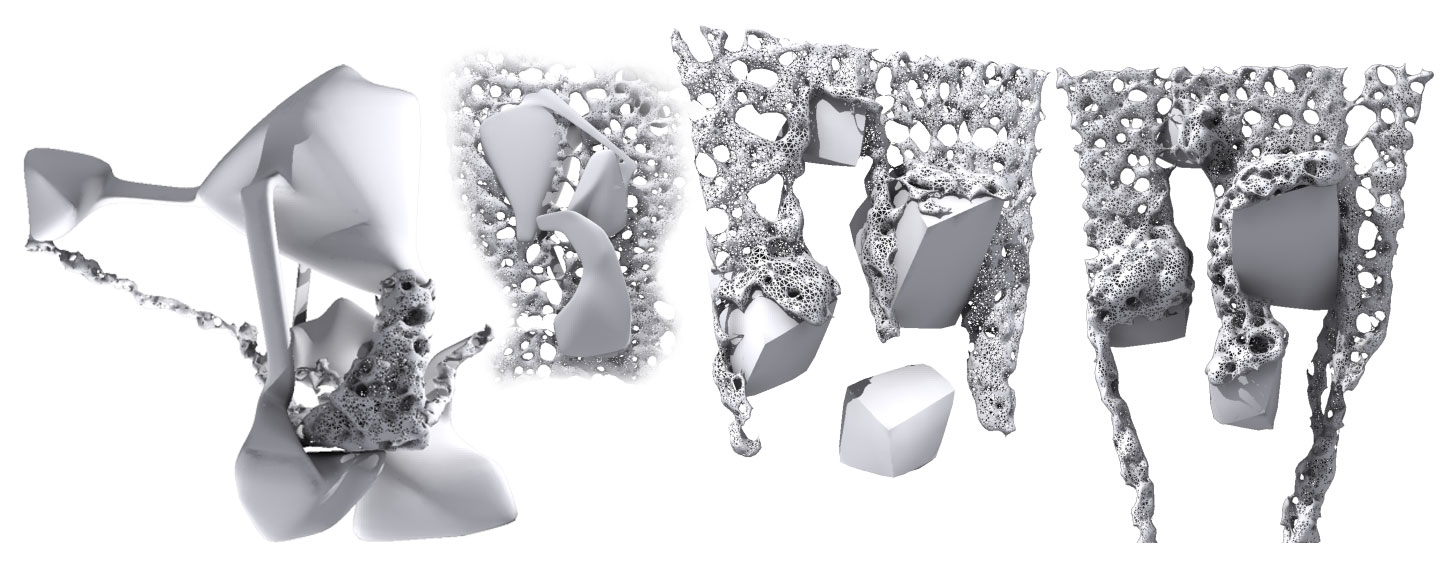
Here is the most updated version of the Agritect project. Need to determine how to make a balance between the smooth, explicit extrusion on the left; and the open, rigis system on the right.
(The left uses 1 curve to loft each node. Middle: 1 curve each node, then a curve of same height between. Right: 4 curves tight to create extrusion, creates tight corners)
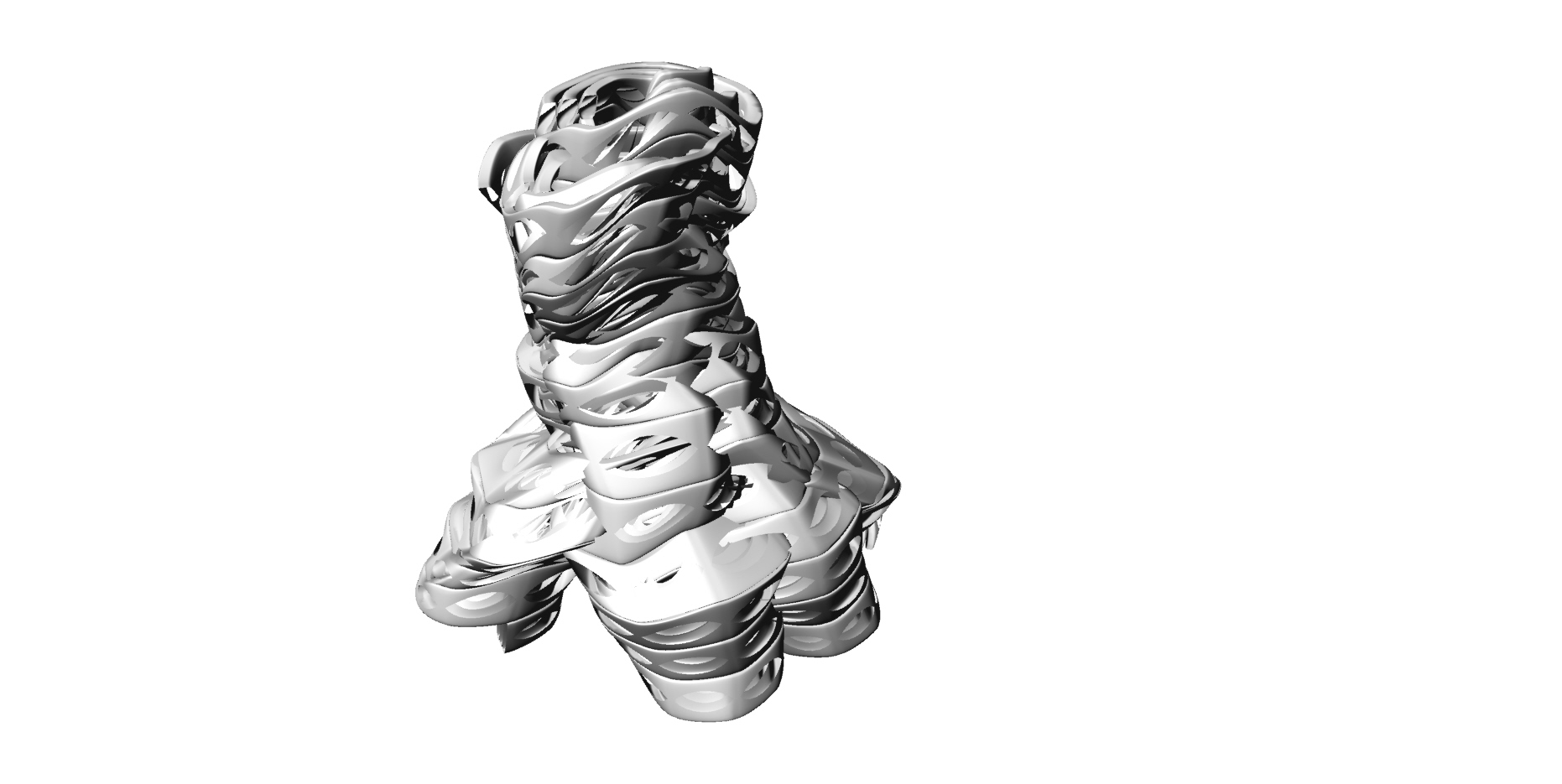
Also, in an attempt to start interconnecting multiple seeds, a strange folly appeared. Instead of connecting the edges, the seeds began to merge into a larger single seed. It doesn’t fit with my story, or the ‘reality’ which I have created, but it is still very provocative. Something to look at after the fact…
→ Leave a CommentCategories: matthew pauly
→ Leave a CommentCategories: Mark Bearak
crawling robot
→ Leave a CommentCategories: john cerone

→ Leave a CommentCategories: Mark Bearak
→ Leave a CommentCategories: jordan trachtenberg
at this point the neighborhood pods were parametric, but a bridge needed to be connected with to the intersection points of the main structure.


→ Leave a CommentCategories: Mark Bearak

Click on the image above to see the most updated script… still in process.
→ Leave a CommentCategories: matthew pauly
→ Leave a CommentCategories: kirk tracy
→ Leave a CommentCategories: Mark Bearak

Click on the image above to link to the 3/4 midterm..
→ Leave a CommentCategories: matthew pauly
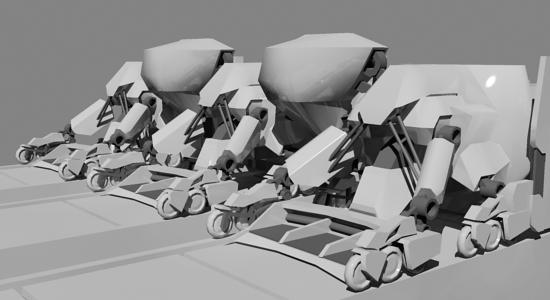
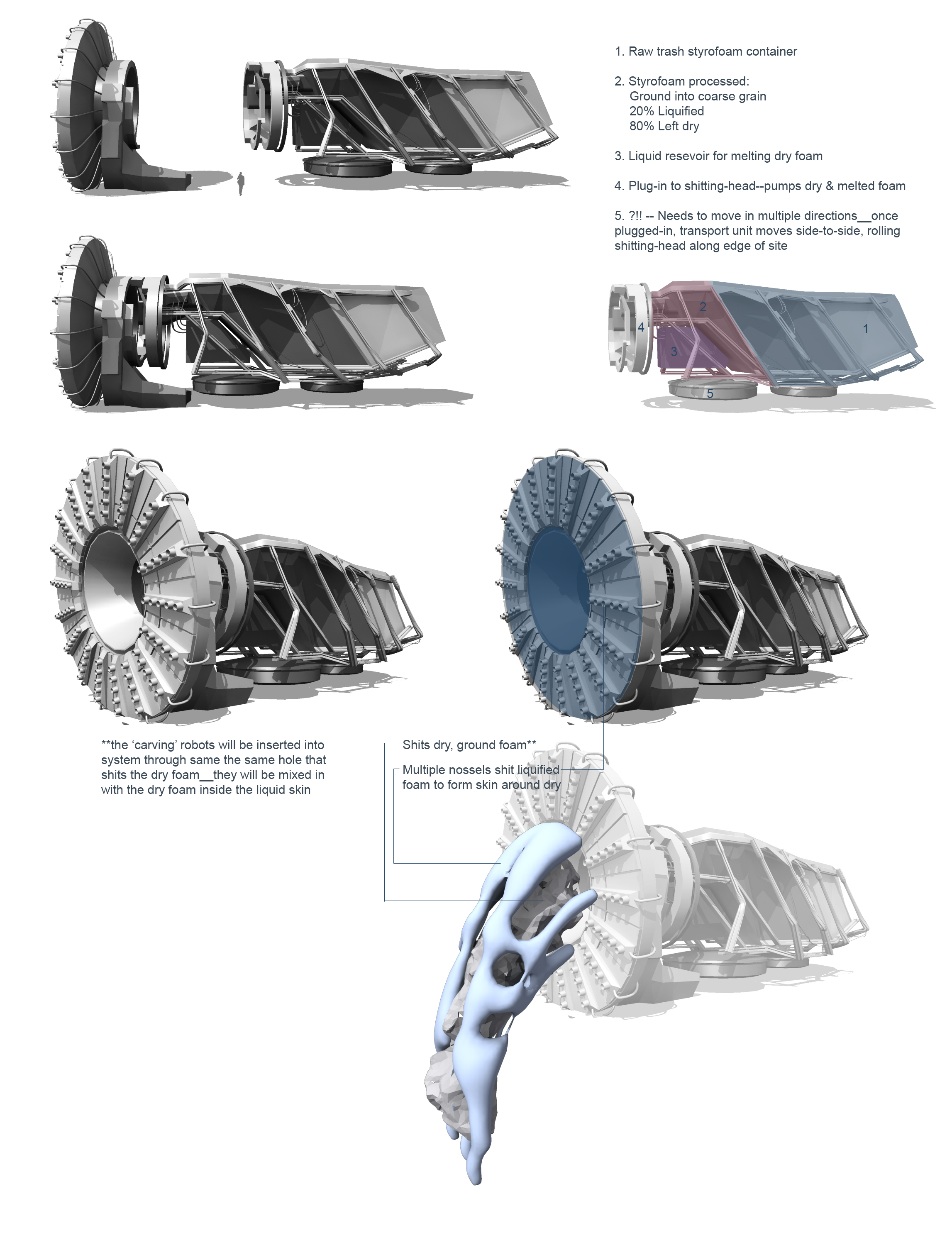
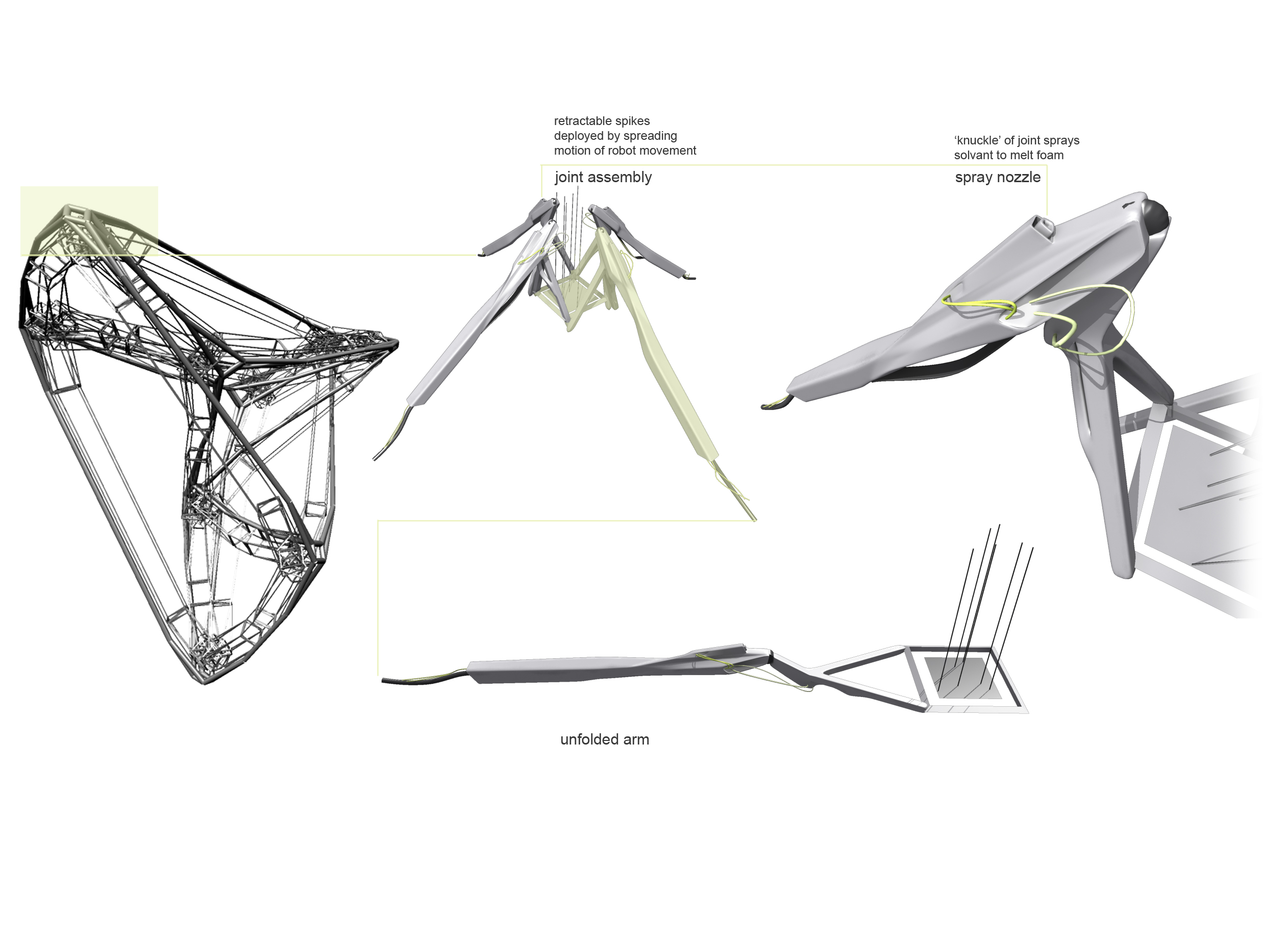
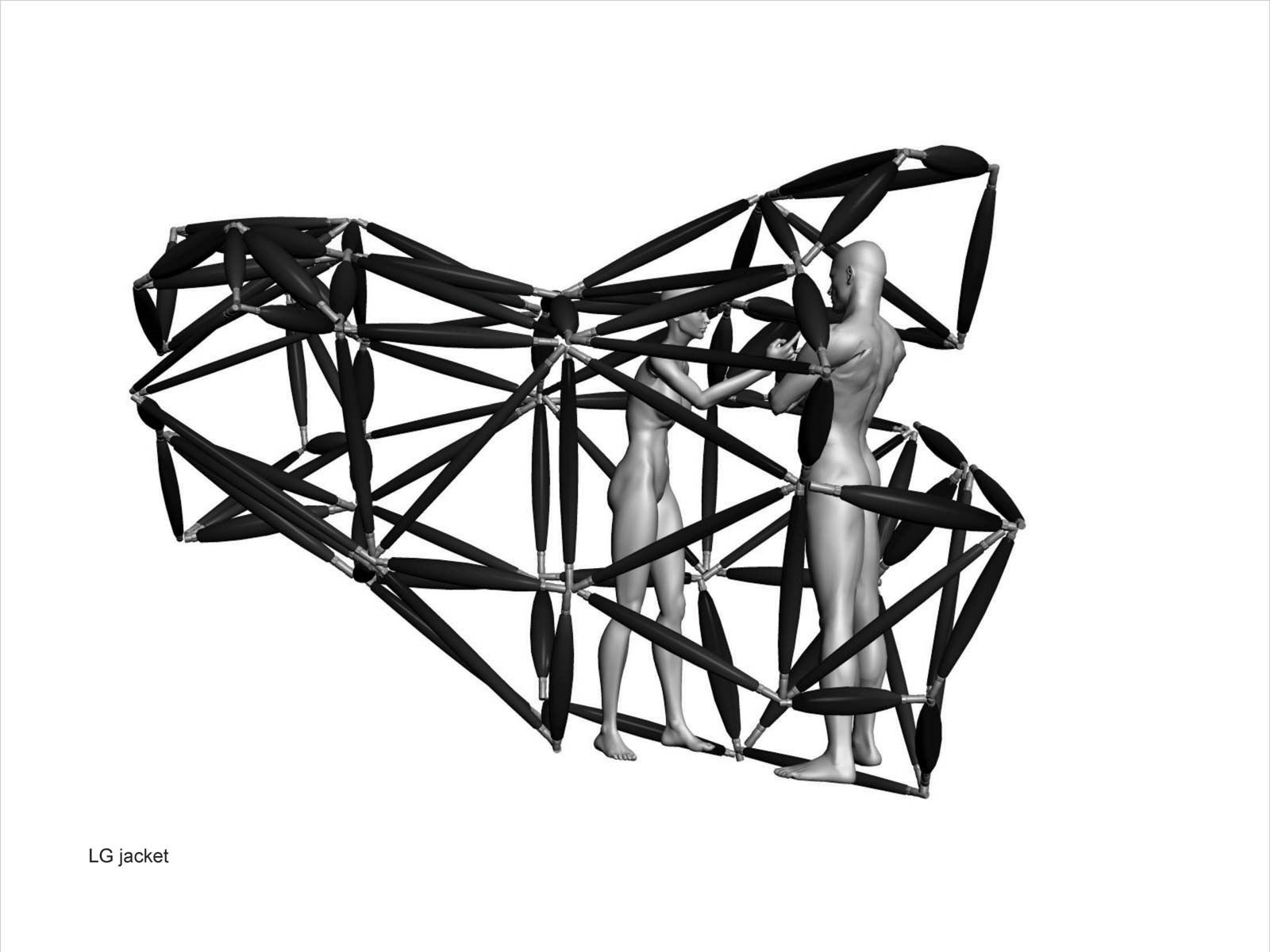
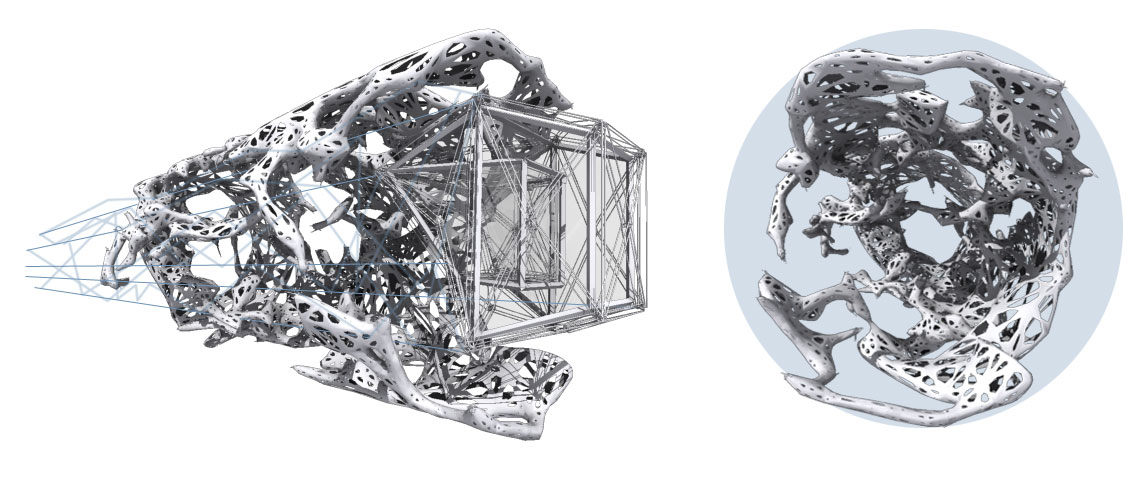
Here is an early rendition of the large construction robot. To be honest, I hate it. I need to take a step back and look at the construction of the structure a bit. The construction robot should be a single massive entity. Right now, most of this robot is entirely arbitrary.
→ Leave a CommentCategories: matthew pauly
→ Leave a CommentCategories: Mark Bearak
→ Leave a CommentCategories: Mark Bearak

→ Leave a CommentCategories: Mark Bearak
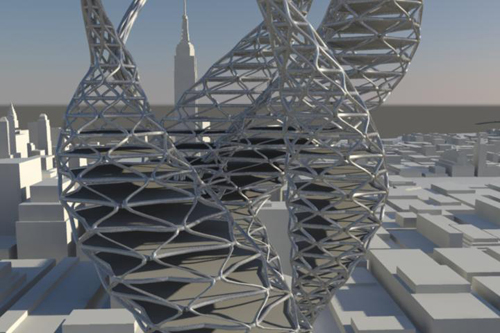
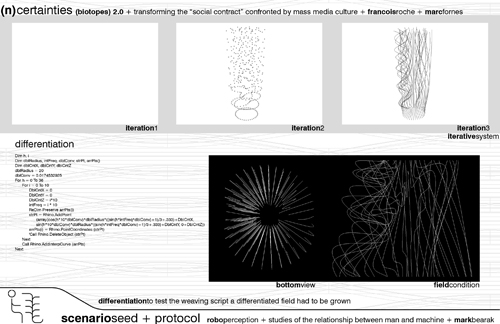
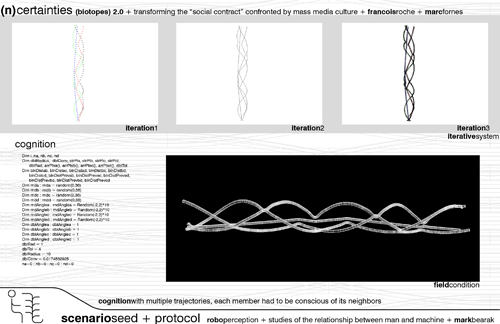
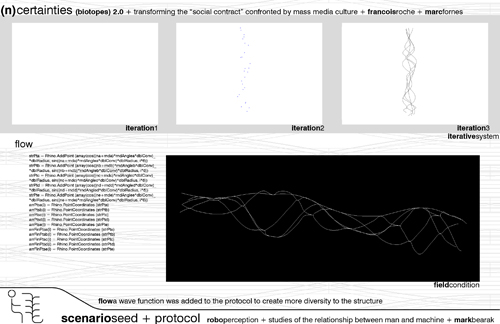
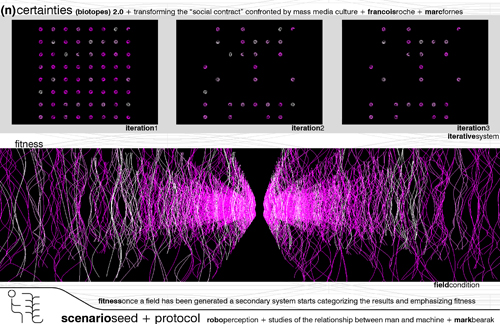
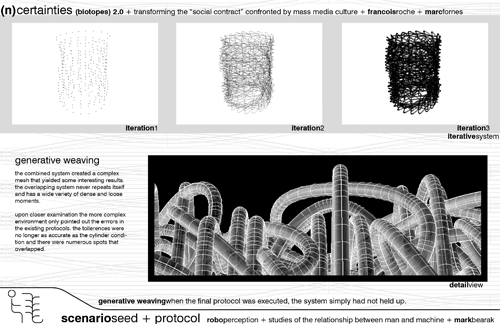
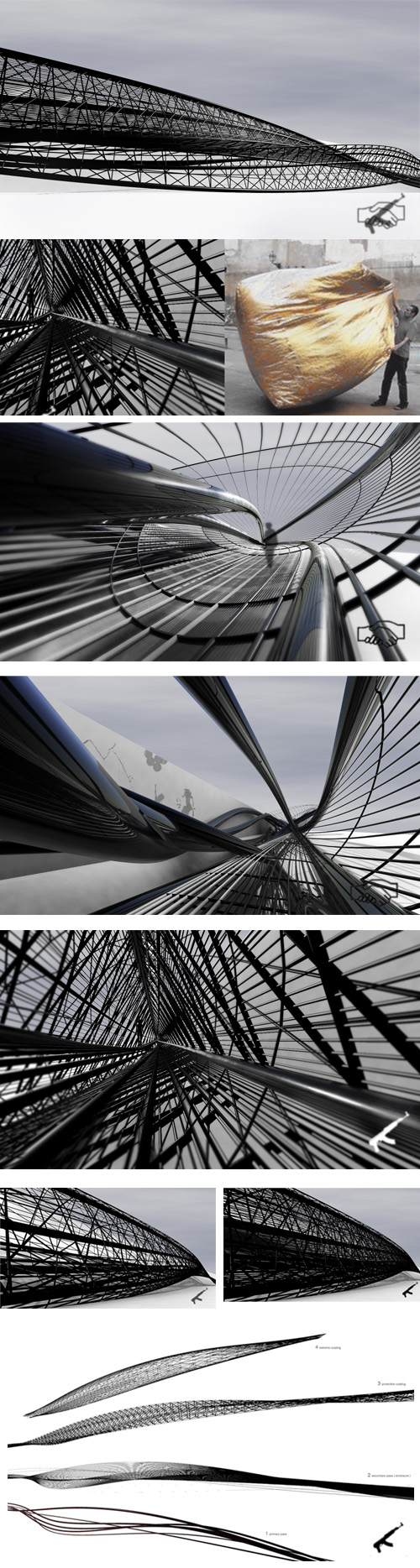
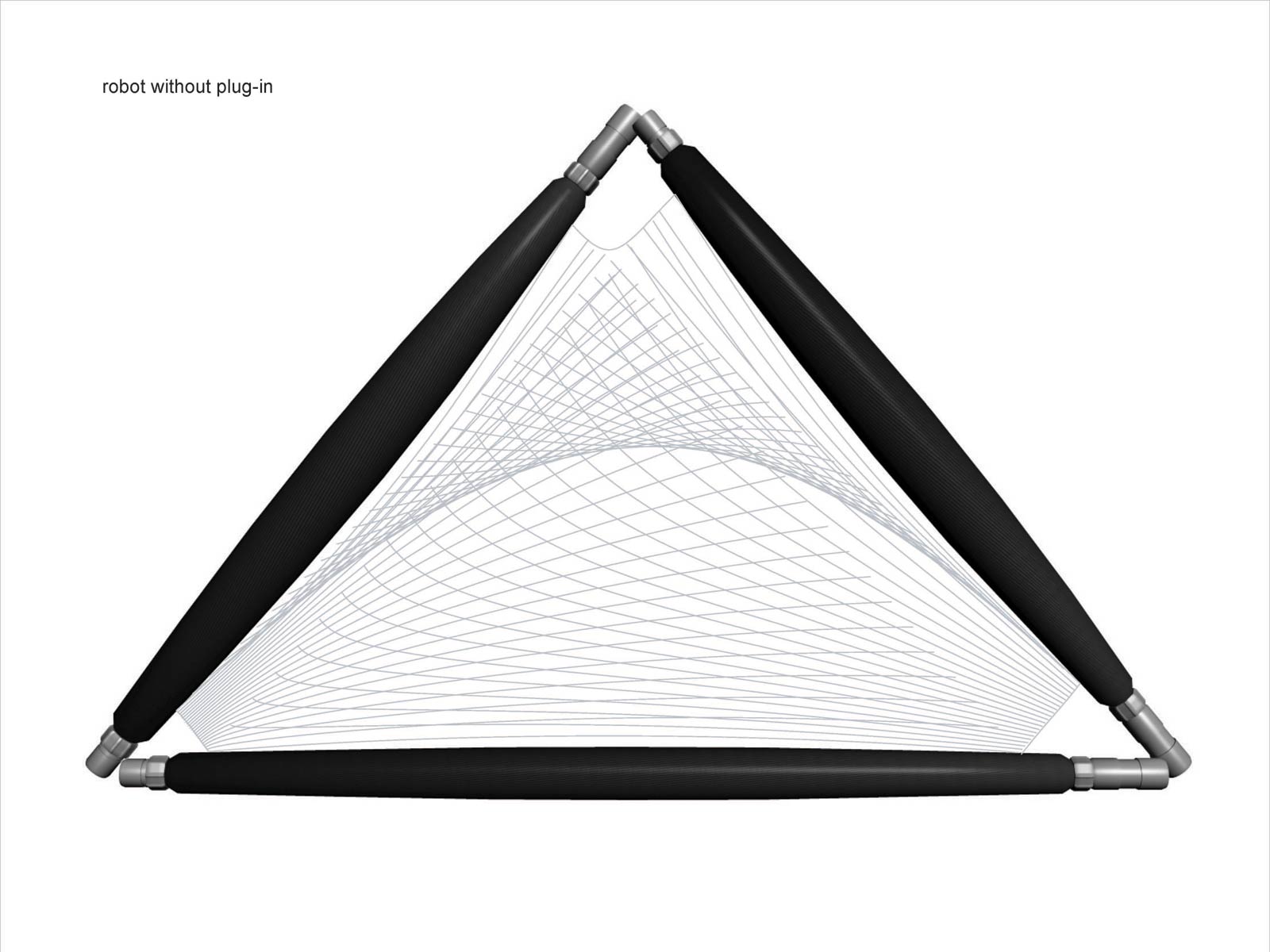
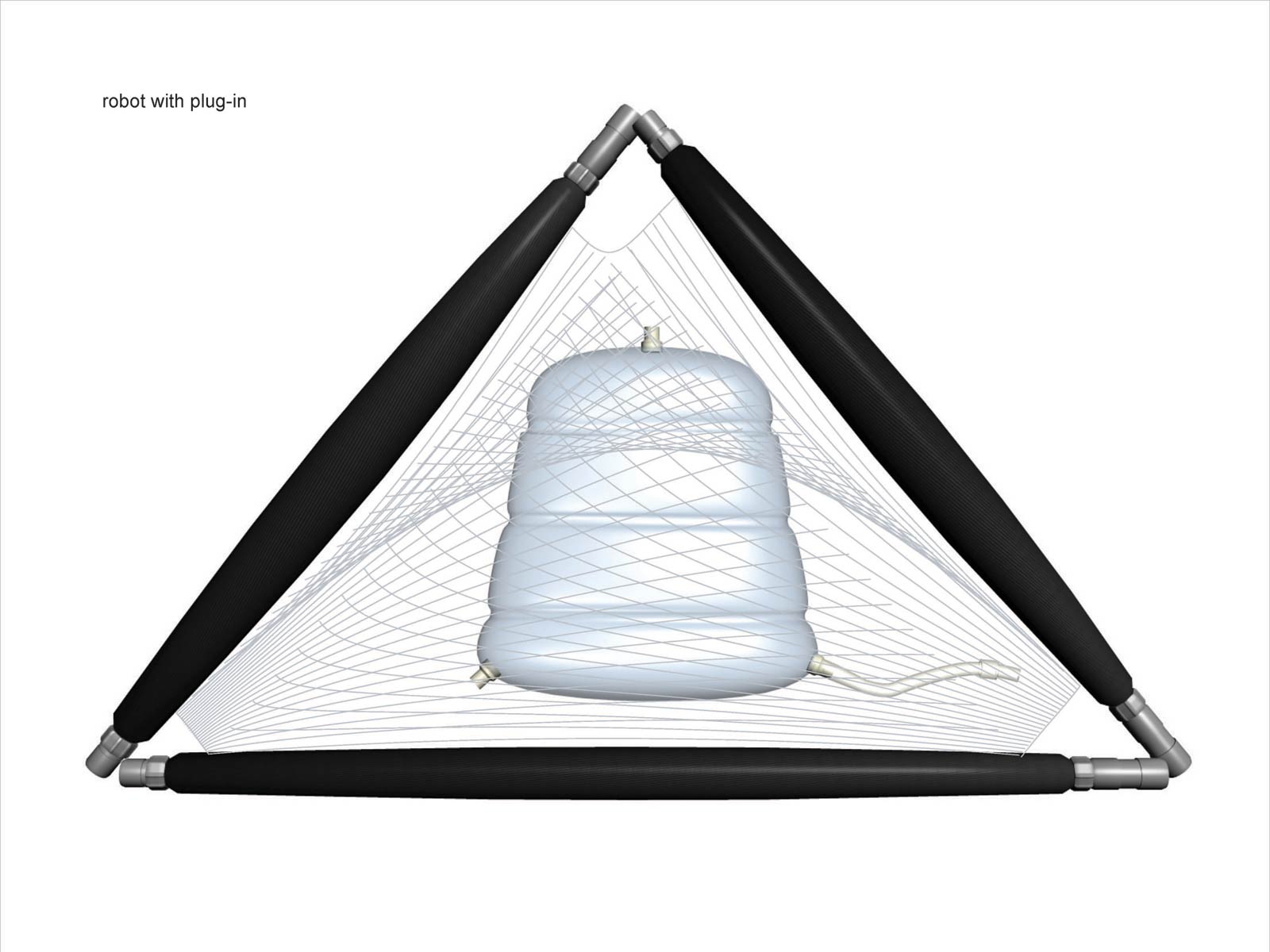
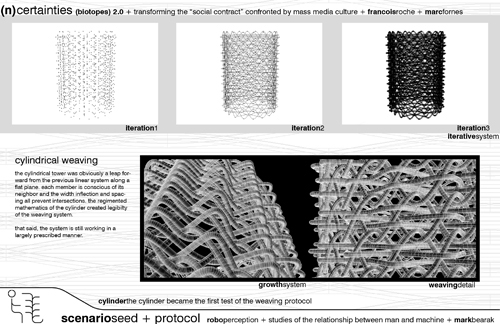
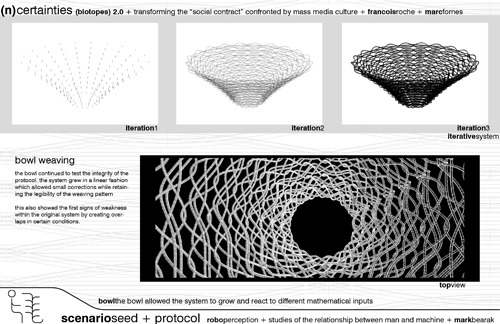
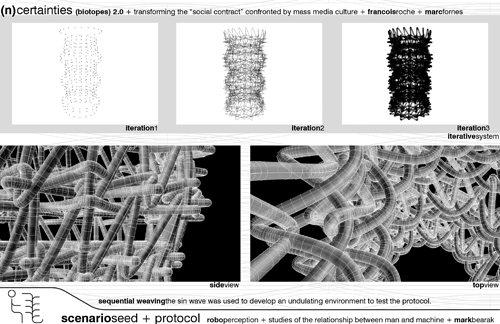
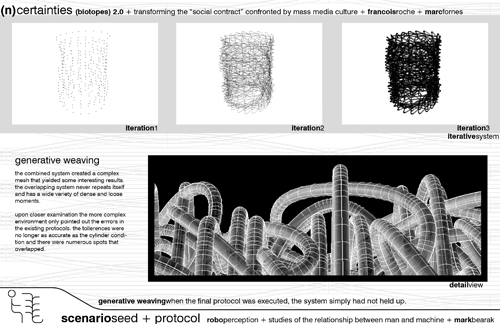
This is the initial diagram for the weaving protocol that I have generated over the last week. I will also comment on the strengths and weaknesses of the system in its current state:
A new approach to the process of weaving had to be taken in order to marry the logic of the overlaps with the robot that would be creating the final mesh. Keeping this in mind the notion of the weaving pattern had to be addressed and cataloged in order to test the boundaries of specific weaving patterns in terms of their strength and reproducibility.
→ Leave a CommentCategories: Mark Bearak











{kind=link}