
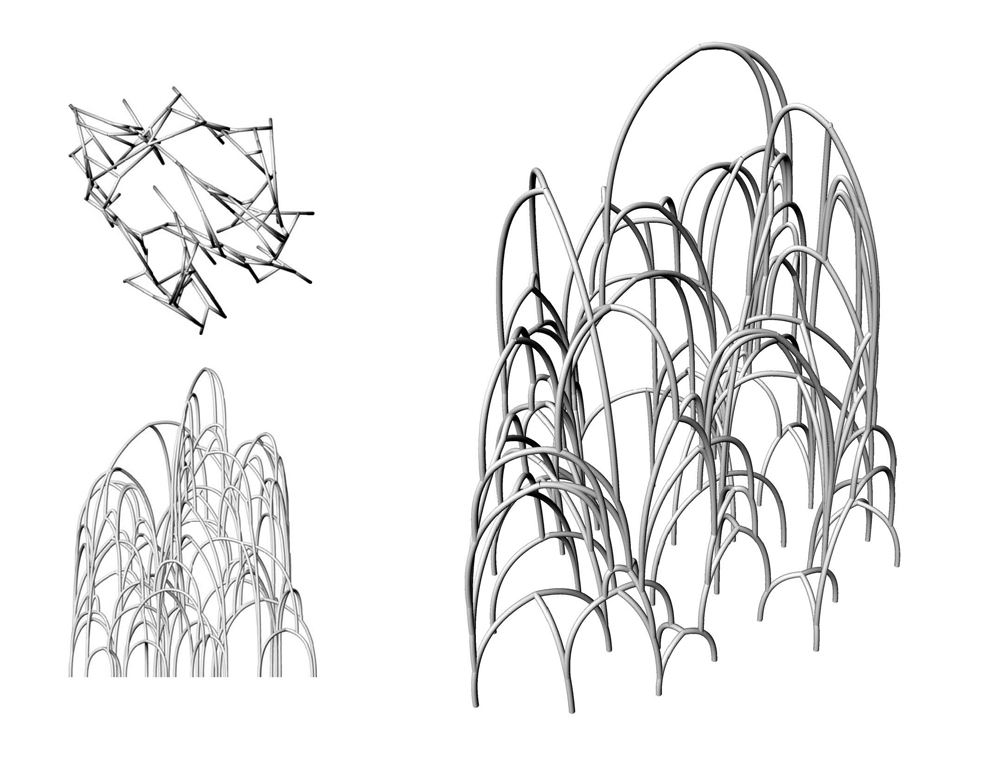
 Each initial point represents one robot. They group themselves in packs of three and build a vault to the trio’s common center point . Then, each Robot picks a random point on their own previous contribution, finds different affiliates, and builds again. This only represents an ideal meta-path. A secondary path, iterated by each robot along their meta-path, will apply the material. Further, moments of failure, vault abandonment, and rogue robots will be incorporated.
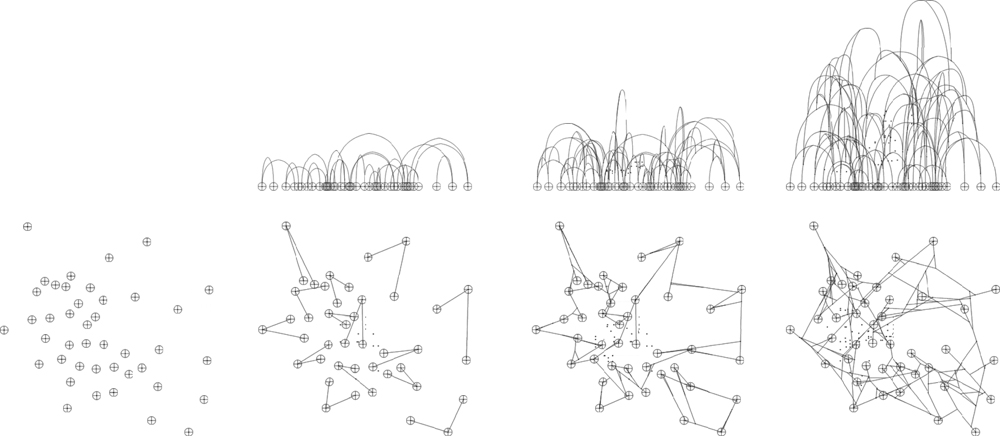
Each initial point represents one robot. They group themselves in packs of three and build a vault to the trio’s common center point . Then, each Robot picks a random point on their own previous contribution, finds different affiliates, and builds again. This only represents an ideal meta-path. A secondary path, iterated by each robot along their meta-path, will apply the material. Further, moments of failure, vault abandonment, and rogue robots will be incorporated.
{kind=link}
0 responses so far ↓
There are no comments yet...Kick things off by filling out the form below.