

Entries categorized as ‘Mathew Staudt’
MS-08.08.23
October 24, 2008 · Leave a Comment
 She self intersects less due to smarter robot comrade search. Next on agenda:
She self intersects less due to smarter robot comrade search. Next on agenda:
1 Grant robots more memory
2 Articulate robot path on surface
3 Make material application look less like sandbags
4 Calibrate building module to allow openings
5 Kill switch for robots
Categories: Mathew Staudt





MS-06.10.08
October 6, 2008 · Leave a Comment
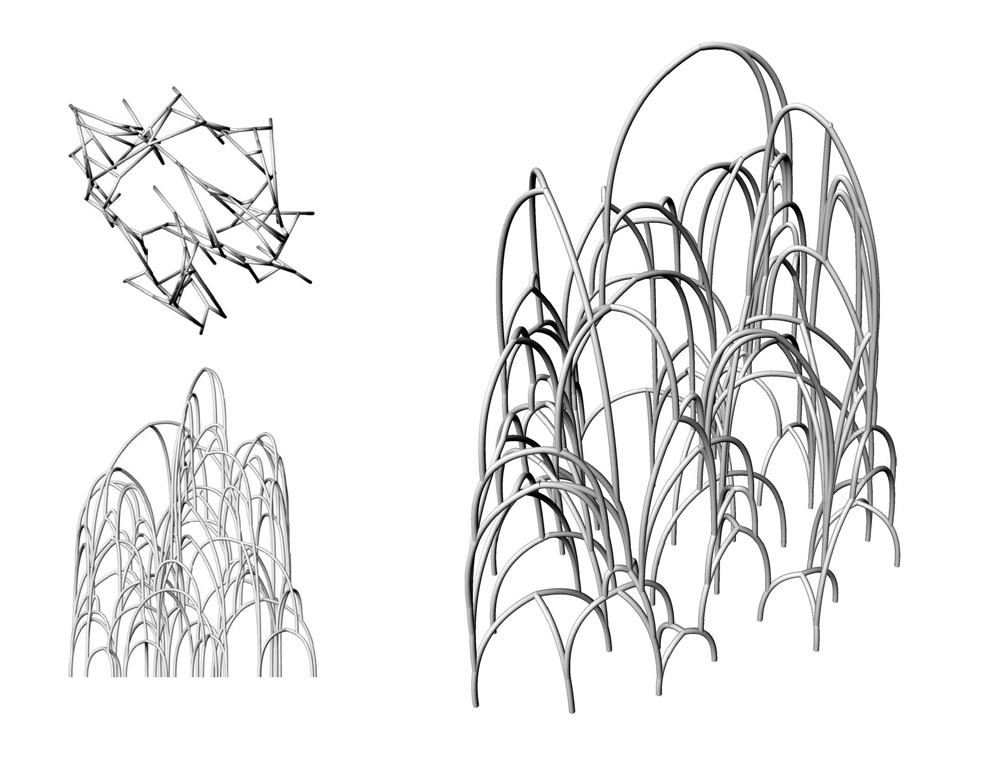
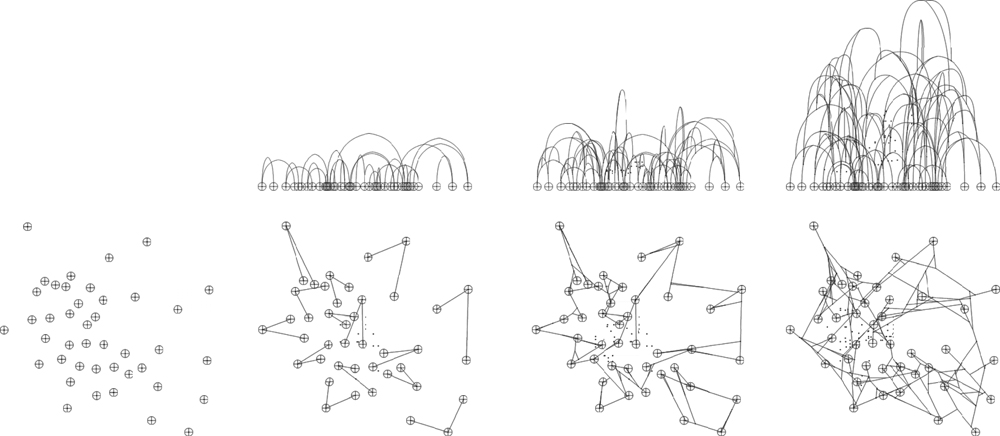
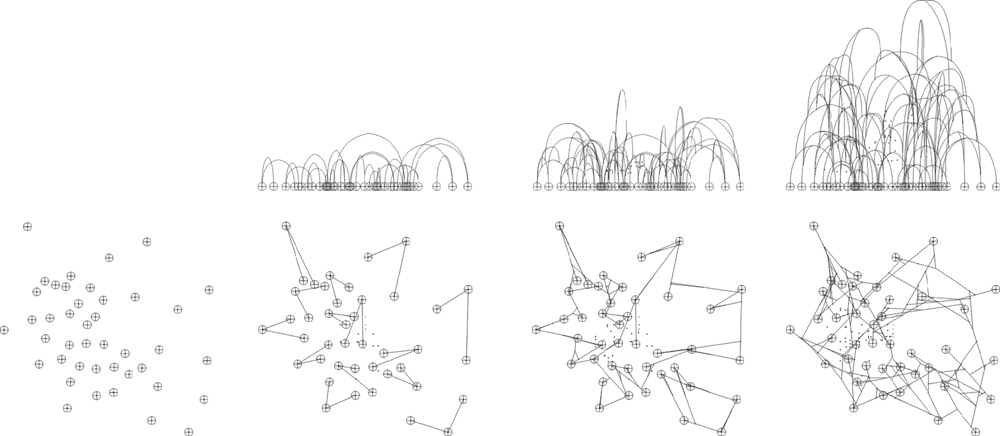 Each initial point represents one robot. They group themselves in packs of three and build a vault to the trio’s common center point . Then, each Robot picks a random point on their own previous contribution, finds different affiliates, and builds again. This only represents an ideal meta-path. A secondary path, iterated by each robot along their meta-path, will apply the material. Further, moments of failure, vault abandonment, and rogue robots will be incorporated.
Each initial point represents one robot. They group themselves in packs of three and build a vault to the trio’s common center point . Then, each Robot picks a random point on their own previous contribution, finds different affiliates, and builds again. This only represents an ideal meta-path. A secondary path, iterated by each robot along their meta-path, will apply the material. Further, moments of failure, vault abandonment, and rogue robots will be incorporated.
Categories: Mathew Staudt


{kind=link}
{kind=link}